


突然現金が必要になった際、iPhoneを売却してすぐに現金を得られるi-Market(アイマーケット)が口コミで注目を集めています。
i-Market(アイマーケット)では、不要になったiPhoneを「フォトキャッシュ」と呼ばれる買取査定システムを通じて、即日で現金化してくれます。この「フォトキャッシュ」は後払いではなく、先払いでの現金化サービスを提供しており、ブラックリストに載っているような問題がある人でもその日のうちに現金を手に入れることが可能です。
このサイトではiPhoneの即現金化で話題を呼んでいるi-Market(アイマーケット)に焦点を当て、どれほどの金額を得られるか、またi-Market(アイマーケット)がどれだけ安全なのか、どのようなシステムを利用しているのか等、そのメカニズムや詳細についてご紹介します。急ぎで現金が必要な方は、是非このサイトの情報をご覧ください。
i-Market(アイマーケット)の運営会社について
i-Market(アイマーケット)とは、iPhoneの買取業者で、上記の通り株式会社エヌエスティという東京都千代田区の会社が運営しています。実際にこちらの会社は東京都公安委員会発行の古物商許可証を受けている、正規の買取業者になります。(第304412118897号)
i-Market(アイマーケット)でのiPhone買取方法としては、以下の3つがあります。
・郵送買取
・店舗買取
・フォトキャッシュ
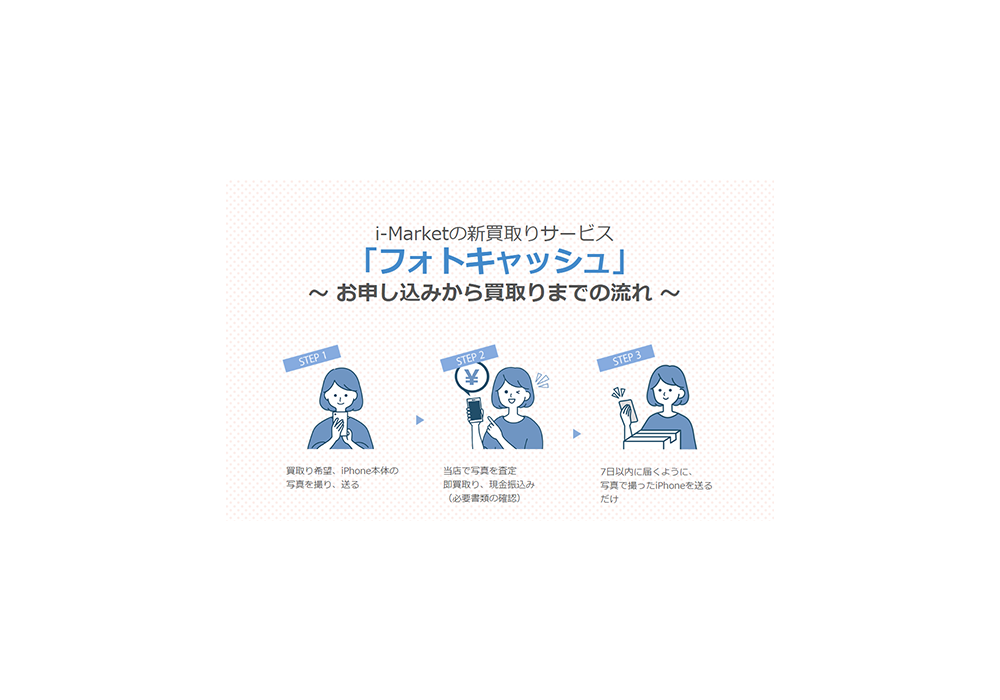
その中でも注目なのが、「フォトキャッシュ」という先払いのiPhone買取サービスを使えば、iPhoneの写真を送信するだけで、即座に現金化ができます。
iPhoneを現金に換えたいと思っても、すぐにでも売って現金を得たかったり、店舗に足を運ぶ時間がなかったりするとなかなか困難ですよね。
実際にiPhoneの買い取りには、店までの移動や査定に時間が必要です。
しかし、このi-Market(アイマーケット)のフォトキャッシュであれば、iPhoneを写真で撮って送信し、その場で買い取ってくれるため、即日で現金が手元に入るのです。
しかし、i-Market(アイマーケット)のフォトキャッシュを利用すれば、写真を撮って送るだけで、迅速に買取してもらえ、当日中には現金を受け取ることができます。その後、写真で撮影したiPhoneを7日以内に送付するだけで完了します。i-Market(アイマーケット)は、簡単に現金を得ることができる買取サービスを行っています。
i-Market(アイマーケット)の口コミを見てみると…
こちらでi-Market(アイマーケット)についてどんな評価や口コミがあるのか調べてみましたが、下記の通りにまとめてみました。
以上のような評価や口コミがありましたが、査定金額や実際に自分の口座へ振り込まれる時間はまちまちだったりするみたいですが、おおよそ納得の行く形で査定されていたり、迅速に振り込まれたりされているという評価や口コミが多いようです。
様々な買取業者の中でなぜi-Market(アイマーケット)が選ばれるのか?
急に現金が必要な時に助かる買取業者のi-Market(アイマーケット)。
その中でもなぜi-Market(アイマーケット)が選ばれるのか調べてみました。
即買取&即現金化!
i-Market(アイマーケット)では、フォトキャッシュ・郵送買取・店舗買取問わず、契約成立後は迅速に現金での支払いが行われます。
業界トップクラスの高価買取
国内外に独自の販売ネットワークを展開しているi-Market(アイマーケット)は、買取市場での最高価格を目指し、顧客に最大限の価値を返すように価格を設定しています。
査定料と手数料無料
i-Market(アイマーケット) でのiPhone査定は無償で行われます。査定のみであれば費用はかからず、手軽に利用できます。
専門の査定スタッフが常時対応
常に市場分析を行っているi-Market(アイマーケット)では、商品の価値を最新の市場価格に基づいて査定します。
選べる3種類の買取方法
i-Market(アイマーケット)では、フォトキャッシュ・郵送買取・店頭買取と3つの方法から選択できます。
・フォトキャッシュの場合:i-Market(アイマーケット)の公式サイトより申し込みできます。
・郵送買取の場合:買取希望のiPhoneと買取シートを用意し、買取シートに必要事項を記入したら、指定の住所に郵送します。(買取シートは公式サイトからダウンロードできます)
郵送買取の場合の送料は、お客様負担になります。郵送方法は、宅急便やレターパックなどの追跡可能な方法で送ってください。
・店頭買取の場合:店頭での買取希望の方は、必ず来店予約の調整をしてからの買い取りになります。
i-Market(アイマーケット)のそれぞれの買取方法を比べると…
i-Market(アイマーケット)では、店頭買取と、郵送買取、フォトキャッシュの3つの買取方法がありますが、それぞれの特徴をまとめてみました。
|
項目 |
フォトキャッシュ |
郵送・店頭買取 |
|
買取査定価格 |
通常 |
高め |
|
買取までの迅速度 |
最短15分 |
買取契約後 |
|
商品(iPhone)発送〆切 |
7日以内に郵送 |
任意のタイミング |
|
キャンセル料 |
査定金額の返金+40% |
契約成立後に発生 |
|
支払い方法 |
指定の銀行口座へ振込 |
指定の銀行口座へ振込 |
ご覧のように、フォトキャッシュでの買取の場合、最短15分で買取が完了して、すぐに入金を確認することが可能ですが、キャンセル料についてはご注意ください。
フォトキャッシュで査定金額を受け取った後、何かしらの理由で買取対象のiPhoneを送れなくなった時は、買取代金にあわせて40%以上のキャンセル料金が発生するので、気をつけてください。
高く売りたい!i-Market(アイマーケット)で強化買取中の機種は?
現在i-Market(アイマーケット)ではiPhone11・12・13シリーズの機種を紹介し強化買取しています。
その他のiPhoneでも、業界トップクラスの買取価格になるように査定されています。
さらにi-Market(アイマーケット)ではiPhoneの販売も行っていますので、ご興味がある方はお問い合わせください。
i-Market(アイマーケット)の即日現金化サービスを利用する利点と注意点
緊急で現金が必要になった際、融資を受けられない方にも対応可能なのがi-Market(アイマーケット)です。ここでは、i-Market(アイマーケット)の使用時の利点と注意点を見ていきましょう。
i-Market(アイマーケット)のフォトキャッシュを利用する7つの利点
①金融ブラックでもすぐに現金を得られる
i-Market(アイマーケット)最大の魅力は、金融ブラックのような信用情報に問題がある方でも、iPhoneの買取を通じてすぐに現金化が可能な点です。突発的な資金需要があっても、融資を受けられないときに非常に便利です。
②負債として記録されない
i-Market(アイマーケット) i-Market(アイマーケット)は買取先払い制度を利用しており、融資ではないので負債になりません。急な資金調達が必要な場合でも、借入れの心配がなく、安心です。
その為、急にお金が必要になった時も、借金をせずに現金を用意することが出来ます。当然、借金の履歴にはなりません。
③自宅からでも現金を入手可能
i-Market(アイマーケット)は、店舗に出向かずとも、フォトキャッシュを利用することで自宅から直接指定の口座へ入金してもらって現金を得ることができます。これは特に忙しい方にとって大きなメリットです。
④他人に知られずに利用できる
i-Market(アイマーケット)では、家族や会社への在籍確認などがないため、他人に知られずに現金を調達できます。
⑤画面が割れたり、残債があったりするiPhoneでも売却OK
i-Market(アイマーケット)では、画面が割れていても、分割で購入して、まだ残債が残っていても、iPhoneの買取査定をしてもらえます。他の買取業者だと買い取りができないと言われることも多いのですが、i-Market(アイマーケット)では買取可能です。
⑥現金化までの手続きが迅速
i-Market(アイマーケット)は、フォトキャッシュでの買取を行うと、手続きから買取完了まで最短15分で先払いをしてもらえます。
突然お金が必要な時など、i-Market(アイマーケット)であれば買取査定で即日現金化できるので物凄く助かったりします。
365日対応してくれるので、いざという時に味方になる買取サービスです。
⑦安心して利用できる合法サービス
i-Market(アイマーケット)は、公安委員会によって管理された古物商許可証取得済みの買取サービス業ですので、安心して利用できます。
【i-Market(アイマーケット)】の注意点
キャンセル時の手数料が高額
i-Market(アイマーケット)での即日現金化には大きな利点がありますが、キャンセル時の手数料が特に高く設定されている点がデメリットです。キャンセルする際には、査定金額に加えて40%の手数料がかかるため、慎重な検討が必要です。
例えば、フォトキャッシュでの査定金額が30,000円の場合、キャンセル時の手数料は30,000円×40%で12,000円となります。
その為、i-Market(アイマーケット)に支払うキャンセル料金の合計は、査定金額の30,000円+手数料の12,000円で42,000円となります。
i-Market(アイマーケット)の利用方法と買取完了までの仕組み
i-Market(アイマーケット)は、初心者でも安心して使える先払いの買取サービスです。
i-Market(アイマーケット)での申し込み方法
①i-Market(アイマーケット)の公式サイトを通じて、フォトキャッシュでの申し込みを行う
②お手持ちのiPhoneの写真を撮って送信し、iPhoneの買取査定を進める
③査定された買取金額を先払いで銀行振込によって受け取る
④フォトキャッシュからの申し込みで査定して売却したiPhoneを7日以内に発送する
※諸事情によっては、取引のキャンセルも出来ますが、キャンセル料がかかります。
これから買取方法のやり方や準備するものについて、詳細に説明します。
フォトキャッシュの申し込みについて
i-Market(アイマーケット)の公式サイトから「フォトキャッシュ」の申し込みを行います。
ご自身で買い取ってもらいたいiPhoneの機種名などの必須項目を「お申込みフォーム」に入力して送信すると、買取サービスの取引がスタートします。
買取サービスの申し込みが完了すると、買取査定のやりとりで使うi-Market(アイマーケット)の公式LINEアカウントが表示されるので、友だち登録をしてから手続きを行います。
また、フォトキャッシュでの買い取りを希望する場合、以下の書類があわせて必要になります。
◆フォトキャッシュをする時の必要書類
フォトキャッシュ(先払い買取)でiPhone買い取りの手続きを行う際には下記の書類が必要になります。
・顔写真付きの身分証明証(運転免許証・マイナンバーカードなど)
・健康保険証
・直近2ヶ月分の給料明細
・直近2ヶ月分の給料明細の給与振り込みが確認できる銀行口座
・IDセルフィー(身分証明証と本人が写った画像)
郵送買取や店頭買取で申し込む場合も身分証明証の提示が必要になります。
フォトキャッシュ申し込みから査定までの流れ
LINEを通じて買取希望のiPhoneの画像と上記の必要書類などを提出します。
全ての書類提出が終わり、数分したらiPhoneの査定額についての回答が来ます。
i-Market(アイマーケット)は、画面が割れてたり、現在も分割払い中で残債が残ってたりするiPhoneでも業界トップクラスの査定金額で買い取ってくれます。
先払いで指定口座へ入金される
査定額に納得したら、先払いで指定口座へ振り込んでもらう事で現金を受け取るまでの手続きをします。
手続きが完了するまでは、最短で15分ほどで銀行口座にiPhoneの査定金額が振り込まれます。
売却したいiPhoneを7日以内に送る
フォトキャッシュで売却したいiPhoneは、買取手続きをした日から7日以内に発送します。
ただし、何らかの諸事情でiPhoneの発送が出来ない時は、受け取った査定金額+40%のキャンセル料金を払う必要がありますのでご注意ください。
スタッフが初心者の方にも親切に対応してくれる
「先払い買取やフォトキャッシュでの申し込みをしても初めてなのでよくわからない」という方でも、専属スタッフが親切に教えてくれるので大丈夫です。
i-Market(アイマーケット)を上手に活用するには…
今すぐにでも現金が必要な時には手持ちの不要なiPhoneを先払いで買い取ってくれるi-Market(アイマーケット)についてご紹介しました。
i-Market(アイマーケット)は、自宅からでも簡単に現金を入手することが出来る便利なサービスとしてご利用いただけます。
もしiPhoneの売却に興味をもった方は、i-Market(アイマーケット)の公式サイトを見て是非ご検討ください。